
����ȫ������ʶ�㷢�����ֲ�����̬�ƣ�ȫ��������½����չ��ȫԱ����������������ڼ�ʱ���ָ�Ⱦ�ߡ�������Ⱦ��Χ�Լ����ʹ������յȷ��������Ҫ��������������ί�����ġ����ڽ�һ��ǿ����ǰ�¹ڲ�������������֪ͨ����������������Ҫ������ṩ24Сʱ�����������Ҫ��ǿ����������ͼ졢����������νӣ��ڱ�֤���������ǰ���£����Ӻ����������豸���Ч�ܣ��ڹ涨�ķ���ʱ������ϣ���һ�����̺�����������ʱ�����ر��Ƕ���Ը�쾡�족��Ⱥ�ĺ����⣬Ҫ������6Сʱ֮�ڱ���������ͨ����Ϣ���ֶμ�ʱ��Ⱥ�����ͣ��������ݼ�������䱸�¹ڲ����������Լ��������豸�����ٵȴ�ʱ�������Ǻ���ɼ��������漱����������
1��ȫԱ�������Ŷӹ����У�һ����Ⱥ�д��ڸ�Ⱦ�ߣ����㽫������Ⱦ�㡱�����һ�����һЩ����Ҫ��������������ҽ����Ա�������Ӹ�Ⱦ���պ���ѹ���������˷��صIJ���������������Ա���ڷ���Ҫ��Ҫ���봩��ҽ�÷������֡���Ŀ��/������һ���Թ���ñ����������˫���齺���ס����Ա�ǩ�İ���淶ճ�����һ��Ӱ�죬Ҳ�ή�Ͳ������̵�Ч�����������Ŀǰ������������̣��������������ȡ�ܻ�����������ȡ�ܴ����Ż����������ʱ�Ŷ����������ҽԺ����������Ա����������ʡ�˹���
2��ҵ�������Ż�������һ���͵ڶ������̽����Ż���ֱ����������������ȡ��һ���������ҽԺҽ����Ա��������һ�����������ɺ���Һš��ɷѡ��Ǽǣ�ȡ���������Ż������ƣ�
��1��������Ҫҽ����Ա�˹����귢�ܣ����������������������еĹ�����Ա��
��2���������������Ŷӣ������˸�Ⱦ���ա�
��3��������˺��������Ч�ʡ�
��4����ȷ�������ܱ�ǩ����ȷ�淶��

3��Ϊ����ߺ�����IJɼ�Ч�ʣ��Ϻ�������Ƴ���ȫ�µĺ�����ɼ�ȡ��һ��������һ���ӵ���Զ��Ǽǡ���������롢����ϵͳ��Ƶ����ȶ��ֹ���������ֻ��Ҫ��ǰ�����룬Ȼ����ں�����ɼ�һ����Ͻ���ɨ�룬�豸�ͻ��Զ������Ϣ�ռ����̣��������̽��輸�������ɣ���Ϊ�����ݡ�
4���ܵ����鷴��������Ӱ�죬�������Ѿ���Ϊ�ֽ�һ�ֳ�̬���ķ��ش�ʩ���������������飬������ͱ������ϸ�����һ��ĺ�����վ�㣬���˺��������Ա�⣬��ӵ��һλ��������Ϣ�ռ���Ա����Ȼ���ڸ������ж�������Ӧ�ĺ�����㣬��������־Ը���������ޣ�����Э�����ֺ�����㣬��������ֵ�������������վ�������ȴ��ģ�����ص㣬��������Ϣ�ռ���Ա���ָ�������������������ɼ�ȡ��ȡ��ȡ��ȡ��һ����ij�����Ч�����������⡣��ǰ��Ҫר��ɨ��Ĺ���������ֻ��Ҫ������ɼ�ȡ��һ������ܿ��������Ϣ�ռ���ͨ����������ɨ����������ܽ�������Ϣ�����Թܰ�Ȼ����ɲ������������̲�����Ҫҽ����Ա���룬�ⲻ����������ҽ����Ա�Ĺ���ѹ������������ߺ������Ч�ʡ�
5���ڽ��д��ģ������ʱ��������ɼ�ȡ��һ��������Զ�ͳ�Ʋ���������������һ���������豸�ᵯ����ʾ���Դ�������ҽ����Ա���Ӷ���Ч���ٷ������롢©���Լ���ܵ���������������������ɼ�ȡ��һ���Ҳ�ܹ���������ÿ����ǧ�����������˵ĺ���������Ϊ��������ṩ��С��������
6�����ܺ�����Ϣ�ɼ�ȡ��һ�������Ϣ�Ǽǡ����ݺ��顢����ɼ������ݲ�ѯ��ȡ����һ�壬���и���ɨ�롢����ϵͳ����Ƶ������Զ��Ǽǵȹ�����������к������ʱ���豸�ᷢ��������ʾ����ɨ���ά�롱���������˴����룬���ڻ����Ϸ�ɨ�룬�豸�����ѡ�������Ϣ�ѵǼǣ���ȡ����������������ס��ӹܺ���к���������������̾ͼ����ӡ�
7�����ܺ�����Ϣ�ɼ�ȡ��һ����������ʱһ����Ҫ�䱸����������Ա��һ�˸�����Ϣ�ɼ���һ�˸�����������ܺ�����Ϣ�ɼ�һ������������Ϣ�ɼ���Ա�������˹��ɱ���ͬʱ��߲����ٶ�������豸��ʡ������ƽ̨ʵ�����ݻ�ͨ������ɨ��ʱ���豸��ʵʱ�ϴ���Ϣ����ʮ��һ���������ʱ���豸���Զ�ͳ���������������ﵽ10��ʱ���豸����ʾ��ܣ������������������Ӷ�������ɡ�
8�����ܺ�����Ϣ�ɼ�ȡ��һ��������ص�
1��������ȡ����վ�е���Һ����Ҫ���������˶����������������ȫ�Զ�������ȡ��Һ���ƶ�ִ�л�������Ҫ����Ԫ����ͨ��Ԥ�貽������IJ����Ͳ��������Ʋ��������ʹ����Һ���ƶ�ִ�л��������������������Ԥ��λ�ã���������Һ���ƶ�ִ�л����Ͳ�������ڳ�ʱ��ʹ�ú����һ���Ļ�е��λ���α䣬������еĺ�����ȡ����վ���ڸ�Ƶ��ʹ�ú��������ȷ������Һ���ƶ�ִ�л�������Ԥ��λ�á�������к�����ȡ����վ���ڵIJ��㣬�Ϻ���������һ�����ں�����ȡ�IJ����������ϵͳ��
2��������������������������ĵ��������ҽ��ݵ�����ͨ���ı����������ÿһ�α仯�Ľ���������ʵ�ֿɱ�ϸ�ֹ�������������������ǿ�������ĵ�����ʹ֮�����ҽ��ݲ��Ĺ��ɱ仯��ÿ��һ���������壬A��B��C��������ĵ��������ҽ��ݲ�ǰ��һ�������ת��һ������ǡ�
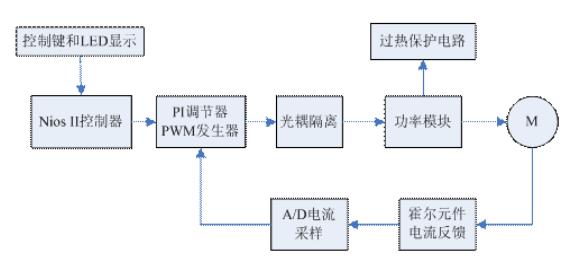
�����������ϵͳ��ͼ��ͼ��ʾ������FPGA��Ϊ������оƬ,���������������������ֵ�·���ּ�����һƬFPGA��ʵ����Ϊ�˿�������������������������������ͱջ�������������������������ҵ�������ɢ�����ұ��������Ľ��ı�������PI���ں����SPWM���ƣ��� ��6·PWM����������������·�����ű��ϵ�6��IGBT��ͨ�ض��������������ʱ�����ÿ���ű۵����°��ŵ���·PWM���������ϰ���PWM��Ϊ��/�͵�ƽʱ���°���PWM��Ϊ��/�ߵ�ƽ��ϵͳ����14λ����200MHz����������PWM�ز����ز�Ƶ��12.2KHz����������ȫ������14λ���Ƚ�����ɢ����200MHzʱ����50MHzʱ�Ӿ�PLL��Ƶ������FPGA�����PWM��������ģ��Ŵ���Ʋ�����������������������״̬��ת�ٺ�ת��ͨ��LEDָʾ���������ת�����ɲ���ٶȾ����ģ�CP�������������Ƶ�ʣ���ϸ�ֵȼ�һ���������CP�ٶ�Խ�ߵ��ת��Խ�����������ڸ�ϸ���¸�����ת��CP����Ƶ�ʾͻ�ܸߣ�����PWM������С��ʹ����ģ��IGBT�����ű�Ƶ�����أ������ǿ�����Ĵ�Ϊ���ӣ�����ģ�����������ϸ���ڲ������������תʱ�����Ʋ������ԣ������ڲ�Ӱ�������о��ȵ�����£�ϵͳ����ת�ٶ�ϸ�־�����4096��2048��1024��512��256��128��64��32֮���Զ����ڣ�ʹ�������ƽ�ȿɿ������С�
3��Ӳ����ƣ������෴Ӧʽ�������Ϊ�������ֻ��ʵ�ֶ�ϸ�֣����������϶�IJ�������ɴﵽ��ϸ�����Դ�һЩ����Ҳ�����ޡ����Ҫʹ�ɴﵽ�����ܴͱ����ܿ��Ʋ�������������������еĵ�����ʹ�䰴�����������½��������㵽������֮�����ж���ȶ����м����״̬����Ӧ�Ĵų�ʸ����ֵҲ�ʹ��ڶ���м�״̬���������������������ȫ�ɴų��ķ���Ҳ���ж���ȶ����м�״̬�����ಽ�������ϸ��ʱ�ĸ����������1/4�IJ����������½��ģ��������м��ֲ������߸��ȶ����м�״̬��ԭ��һ����ת���ĽǶȽ��ɰ˲���ɣ�ʵ���˲���ǵİ�ϸ�֡��ɴ˿ɼ������������ϸ�������Ĺؼ�����ϸ�ֲ�������������������еĵ�����
4���������
��1��������������㷨�O���������������ϵͳ������ơ���������λ��Ҫ��Ϊ���������ʽPID�����㷨��������u��k��=Kp��E��k��-E��k-1����+KIE��k��+KD��E��k��-2E��k-1��+E��k-2����������KPΪ����ϵ����KIΪ����ϵ����KDΪ��ϵ����E��k��Ϊ��k�β���ʱ�������ƫ��ֵ��E��k-1��Ϊ�ڣ�k-1���β���ʱ�������ƫ��ֵ��E��k-2��Ϊ�ڣ�k-2���β���ʱ�������ƫ��ֵ������ʽPID�ļ�������Ծ���ʽPID�Ľ�С����Ϊ����������������Զ�ִ�в������Ŷ���С��һ����ô������Ŀ��ơ�
5���������ת�ٿ��Ƴ�����������Ʋ������ת��Դ�������ƣ����ȶ��岽����������ṹ��srd��Ȼ���д��������������õĺ������ֱ����ò�������IJ��������ٽεļ��ٶȡ����ٽεļ��ٶȡ�ת�٣������˴ﵽ����ٶ�ʱ�IJ������������û�дﵽ����ٶȵ��DZ���Ҫ��ʼ���ٵIJ�����ͨ���Բ�������IJ�������������ȷ�����������ת�ټ��Ӽ�������������������ļ�������5000.��������ļӼ��ٹ��̲�������������Ϊ�Ӽ����˶����ߣ������õ����μӼ����˶����߱ƽ���S�μӼ����˶����ߣ�ʵ����һ�Ӽ����˶����̵���Ҫ�������£�
��1�����ϵͳ��Ӳ��֮��ʼ��������������塢�����������Һ�á�Һ��ѹ����������λ�ü������Դ��ͨ�����ߵȲ�������������Ȼ�������������������������Ӳ����·��
��2����������������Ӳ����·����ʵ�ֵ��ԵĹ��ܡ���������ͨ����λ��Ҫ��Ϊ����IJ����������ʽPID�����㷨�������˲��������ת���Ӷ�������Һ�������ƶ���
��3������տ�ʼ�������˶���Ȼ�����һ��ʱ�������˶�������������˶���ת��ƽ�ȣ����������������õIJ�����������㷨�������Ҫ�Բ���������õ����μӼ������߽��з��棬���������߽��������μӼ������ߣ�����Ҫ���ڲ������������Һ�������ƶ�������λ��ʱ��ͨ��MOS�ܿ��Ƶ�·����������ʹ��Һ�ÿ��Ʒ��õ��˽ϺõĿ��ء�Һ��ѹ�����ģ��ͨ��Һ��ѹ���������������Һ����Һ���ѹ��������ADCоƬת��Ϊ��ѹֵ�������Ϊѹ��ֵ��ͨ����������ѹֵ������Һ����Һ���ѹ��ֵû�г��ޡ�
6��Ӧ���е�ע�����
��1���������Ӧ���ڵ��ٳ���---ÿ����ת�ٲ�����1000ת����0.9��ʱ6666PPS)�������1000-3000PPS(0.9�ȣ���ʹ�ã���ͨ������װ��ʹ���ڴ˼乤������ʱ�������Ч�ʸߣ������͡�
��2)���������ò�ʹ������״̬������״̬ʱ��
��3��������ʷԭ��ֻ�б��Ϊ12V��ѹ�ĵ��ʹ��12V�⣬��������ĵ�ѹֵ����������ѹ��ֵ ���ɸ���������ѡ��������ѹ�����飺57BYG����ֱ��24V-36V��86BYG����ֱ��50V,110BYG���ø���ֱ��80V������Ȼ12���ĵ�ѹ��12V��ѹ������Ҳ���Բ�������������Դ�� ����Ҫ����������
��4��ת��������ĸ���Ӧѡ�������ŵ����
��5������ڽϸ��ٻ���������ʱ��һ�㲻�ڹ����ٶ�������������Ƶ���٣�һ�����ʧ���������Լ�������ͬʱ�������ֹͣ�Ķ�λ���ȡ�
��6���߾���ʱ��Ӧͨ����е���١���ߵ���ٶ�,����ø�ϸ�������������������Ҳ���Բ���5����������������ϵͳ�ļ۸�Ϲ����������٣��䱻��̭��˵�������л���
��7�������Ӧ�������ڹ��������������ͨ���ı��ѹ���������һЩ����Ľ����
��8�������600PPS��0.9�ȣ����¹���Ӧ����С���������С��͵�ѹ��������
(9��Ӧ��ѭ��ѡ�����ѡ������ԭ��
7�����������һ�����ں�����ȡ�IJ����������ϵͳ��ͬ��һ��IJ����������ϵͳ����ƵIJ����������ϵͳ������Զ�������ȡʵ��Ӧ��������Ӳ�����������Һ�ÿ��Ʒ�����ģ�顢Һ��ѹ�����ģ�飬���������������λ��Ҫ��Ϊ����IJ����������ʽPID�����㷨���Ż��˲��������ת���Դ�����Һ�������ƶ�����������ļӼ��ٹ��̲�������������Ϊ�Ӽ����˶����ߣ�ת�ٵ���ƽ�ȡ���Һ�ÿ��Ʒ��õ��˽ϺõĿ��أ���Һ������Һ���ѹ���õ������õļ�⡣��ϵͳ���������λ�ÿ��ƾ��Ȼ��и��ƵĿռ䣬���������м��鲻ͬPID�㷨ϵ����ʵ�顣

|




