
一,设计要求
1、设备产能:≥10PPM;
2、最终合格率为≥99.8%(仅限设备造成的不良产品);
3设备故障率≤2%;
4、兼容多种尺寸模块规格,更换迅速。激光输出功率稳定(波动)≤±1%,振镜焦距可数字显示和调整,范围为-5.0~+5.0mm,调整精度≤0.5mm;
5、焊接轨迹由焊接软件编辑,焊接过程自动化,参数可修改,可设置操作修改权限。
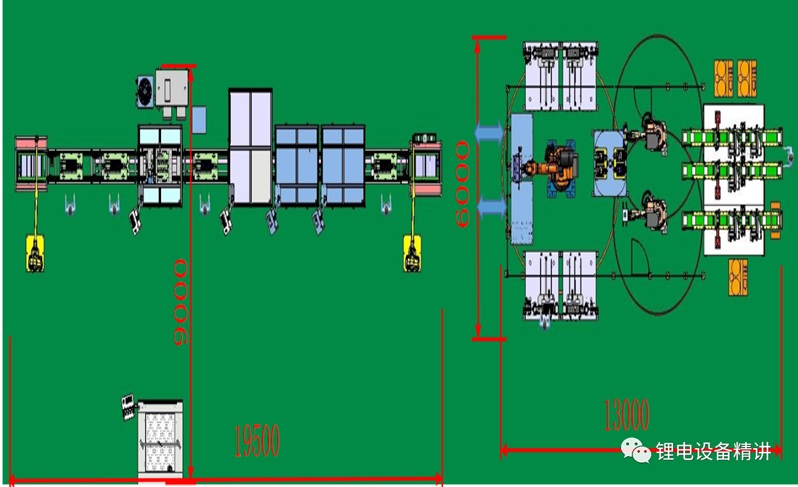
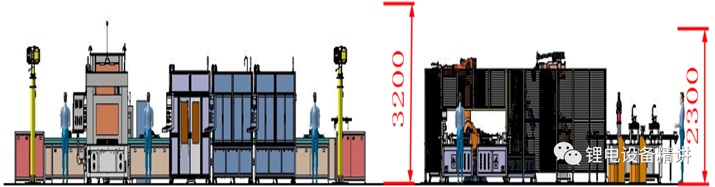
二,设备布局
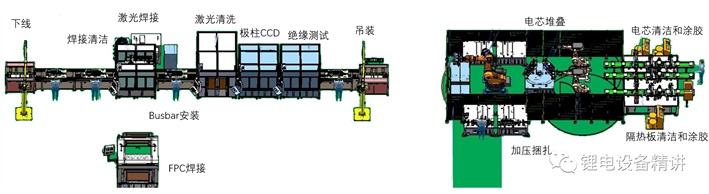
三、单站设备介绍
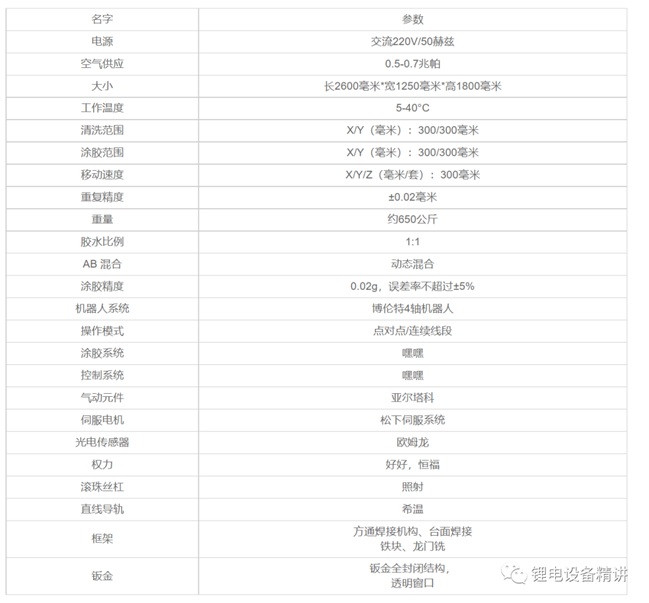
1,清洗涂胶、清洗涂胶站介绍:
1)工人将电芯放在送料传送带上后,设备可自动完成清洗涂胶;
2)设备节拍:12PPM;
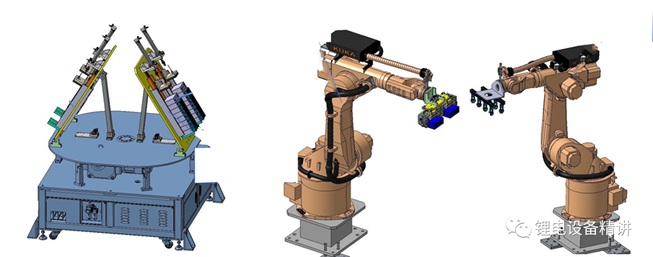
2,电芯堆叠
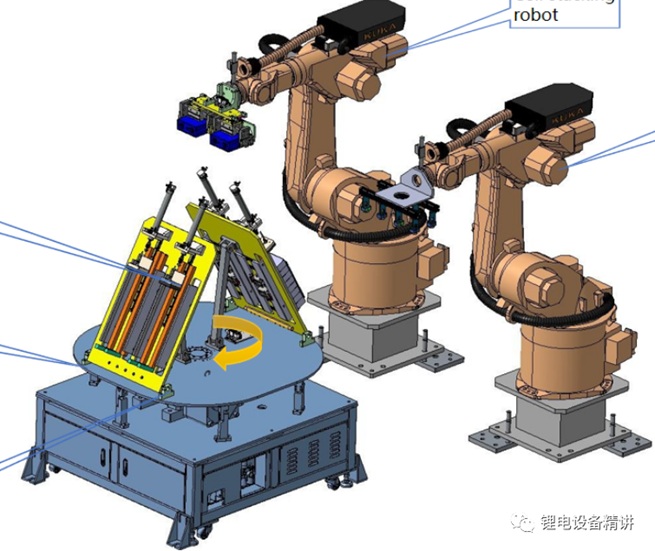
*操作流程:
1)动作流程:堆垛机器人从涂胶设备输送线上卸料,按模块配方的串并顺序进行堆垛作业。这种堆叠方式可以灵活地适应具有不同配方的串联-并联顺序的模块组合。堆叠顺序从下到上,电池和绝缘板交替,从第一手电池到第一手绝缘板,再到最后一手1电池。在堆叠过程中,向下的压制和跳动机构同时进行预压和固定。
2)抓手由机器人控制,控制夹持机构,抓手设计有光电感应单元到位。模块堆垛平台采用固定坡度双工位设计。每个工位都包含双夹具,可以同时放置两个电池。A工位堆垛时,B工位同步进行挤出前的移动工作,双工位交替进行,从而提高堆垛和移动的效率。
|




