
在当前汽车技术和市场背景下,新能源汽车搭载了一系列先进的主动安全和被动安全系统,以确保车辆的行驶安全和对驾乘人员进行保护。这里对其中一些常见且重要的主/被动安全系统进行梳理,并分别介绍如下:
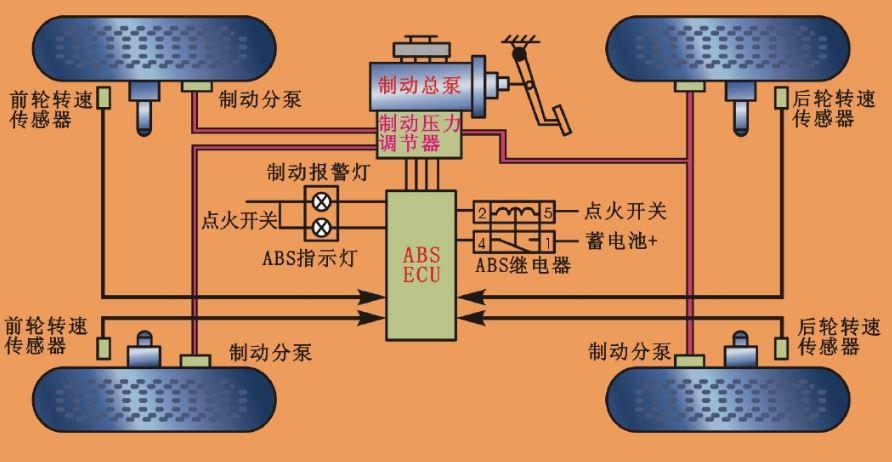
图1 新能源汽车常见主被动安全系统一、主动安全系统
1、防抱死制动系统(ABS):在紧急制动时防止车轮抱死,以确保车辆在湿滑或粗糙路面上保持转向控制。
2、电子稳定系统(ESP / ESC):监控车辆动态并在即将发生侧滑或翻滚时干预,通过迅速调整电机输出扭矩,即改变驱动力分配,通过对前后轴或左右车轮的扭矩进行独立调控,以抵消可能导致不稳定的力量,同时通过与制动系统的协同工作,来恢复车辆稳定性。
3、自适应巡航控制(ACC):自动调整车速以保持与前方车辆的安全距离,有的还包括低速跟车功能和启停功能。
4、车道保持辅助系统(LKAS):通过摄像头识别车道线,当车辆无意间偏离车道时,系统提供警告或轻微转向干预,以保持车辆在车道内行驶。
5、盲点监测(BSM) 和变道辅助(LCA):探测后方盲区车辆,当变换车道存在碰撞风险时,给予驾驶员视觉或听觉警告。
6、自动紧急制动(AEB)
1)检测前方可能发生的碰撞,如果驾驶员未能及时反应,系统将自动启动制动功能,以避免或减轻碰撞后果。若将AEB按工作时的车速范围进行划分,可将其分为城市速度AEB(适用于市区低速环境)和高速AEB(适用于高速公路场景)。
2)之所以设置速度限制主要的原因还是因为当前技术状态的限制。如在高速行驶状态下,AEB系统的制动距离会更长,如果超过系统设计的最佳工作速度范围,可能无法有效避免碰撞或制动距离不足以完全停下车辆,这反而可能导致更严重的后果,比如车辆失控或打滑。
3)同时,AEB系统依赖于雷达、摄像头和其他传感器来检测前方障碍物,当车速过高时,对于障碍物的识别难度将增加,此时可能出现对前方障碍物的类型、尺寸和速度判断存在误差,这将有可能导致紧急制动的效果受到影响。
4)另外,在高速状态下,如果突然猛烈制动可能会给乘客带来极大的不适,甚至引发追尾事故。为了避免此类情况,AEB系统在设计时会设定一个既能发挥其功能又不会引起次生事故的最大工作速度。目前我国对于AEB系统在基本性能上的要求主要是以推荐性的国家标准《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》为主要应用。

图2 AEB相关基本性能要求
5)此标准也仅对最低车速进行了说明;同时由于该标准是推荐性,并非强制性,因此各企业会根据不同车型和系统的设计规格,设定各自的工作速度范围。
7、AEB的设计初衷是在不可避免的碰撞风险出现时,尽可能减少碰撞的危害程度或者完全避免碰撞。其工作流程是,在面对前方障碍物时,首先会尝试通过警告驾驶员来促使他们做出反应,如果驾驶员未及时采取制动措施,系统则会自动介入,施加必要的制动力以降低碰撞速度或避免碰撞,此策略中之所以不优先选择避让动作,主要也是因为技术的制约。
1)首先,紧急制动主要依赖于车辆自身的制动系统,通过检测前方障碍物的距离和速度,计算出需要的制动力度和时间,然后迅速执行刹车动作,这种方式相对简单直接,系统响应速度较快,技术成熟度较高,能在很多紧急情况下有效降低碰撞速度或避免碰撞。相比之下,避让动作涉及转向系统的响应、对周围环境的精确感知、复杂的路径规划和决策制定,以及在极短的时间内执行避障动作等一系列难题。
2)目前的技术条件下,要在所有驾驶场景中安全、准确地实现自动避障还存在较多挑战,如对周围环境的感知可能存在盲区或误判、路径规划算法需要在毫秒级别内找到安全避障路径、线控转向及制动技术尚未成熟等,因此,此时采用避让策略稍有不慎就可能导致车辆失控或与其他交通参与者发生碰撞。
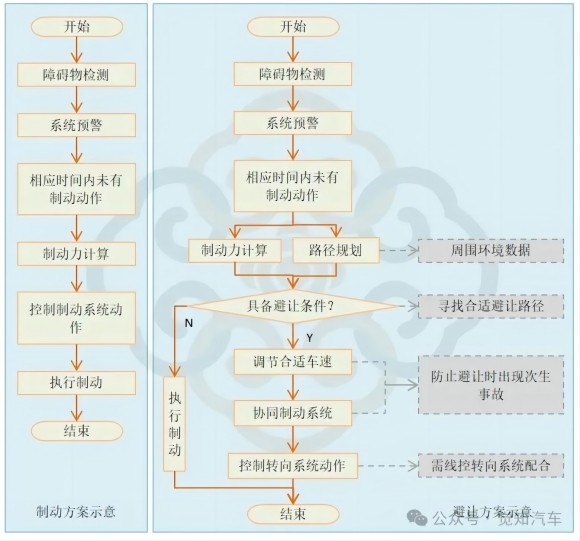
图3 制动与避让方案的差异示意
3)基于相关技术背景,在现阶段,多数主动安全系统在紧急情况下会优先选择紧急制动,而在更高级别的自动驾驶系统中(如L3及以上级别),随着技术进步和系统的不断完善,避障功能或将成为更完整的解决方案的一部分。但在技术尚未足够成熟之前,出于安全考虑,紧急制动是较为可靠的方案。 |




